接口
python副业
自然语言处理
RecyclerView
产品运营
Pyhton
SAP UI5
esp8266wifi
一卡通数据分析
定时同步
智能指针
ldarg
仿抖音APP
OPENCV_DIR
opc
空时自适应处理技术
模拟量公式
SPB17.4
networkx
手动部署StarRocks
状态估计
2024/5/5 21:38:30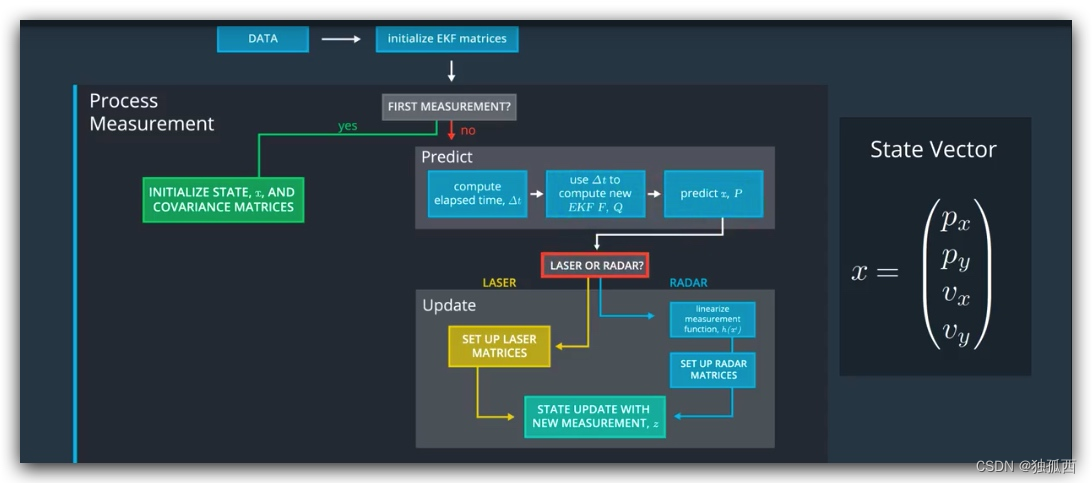
扩展卡尔曼滤波技术(Extended Kalman Filter,EKF)
一、概念介绍
卡尔曼滤波是一种高效率的递归滤波器(自回归滤波器), 它能够从一系列的不完全包含噪声的测量中,估计动态系统的状态,然而简单的卡尔曼滤波必须应用在符合高斯分布的系统中。
扩展卡尔曼滤波就是为了解决非线性问题,普通卡尔曼…

《视觉SLAM十四讲》读书笔记(四)
非线性优化6.1 状态估计问题6.1.1 批量状态估计与最大后验估计6.1.2 最小二乘的引出6.1.3 最小二乘问题解析解6.2 非线性最小二乘6.2.1 一阶和二阶梯度法(1)最速下降法(2)牛顿法(3)小结 1(4&…
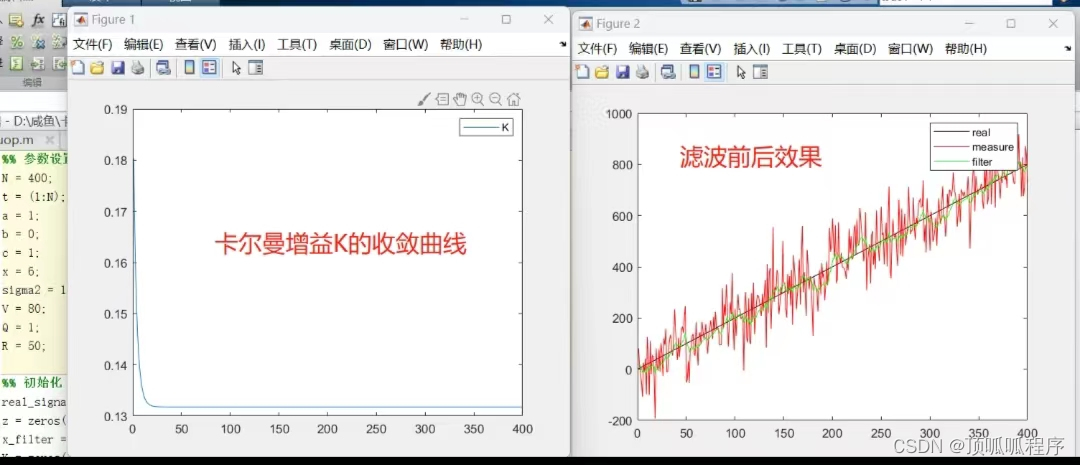
02基于matlab的卡尔曼滤波
基于matlab的卡尔曼滤波,可更改状态转移方程,控制输入,观测方程,设置生成的信号的噪声标准差,设置状态转移方差Q和观测方差R等参数,程序已调通,需要直接拍下。